Der Radarsensor – Bitte Abstand halten!
Der Radarsensor ist ein wichtiges Bauteil, wenn es um die Erkennung von Objekten auf längeren Distanzen geht. Beim Radar steckt der Teufel im Detail – warum das so ist, erläutere ich Ihnen in dieser Ausgabe.
„Radar‟ kommt aus dem Englischen, steht für „Radio detecting and ranging‟ und bedeutet, mittels Radiowellen Abstände zu messen. Das Prinzip, das sich dahinter verbirgt, ist eigentlich recht simpel: Elektromagnetischen Wellen (Radiowellen) werden vom Radarsensor ausgesendet und zeitverzögert wieder empfangen, in Abhängigkeit von Abstand und relativer Geschwindigkeit des vorausliegenden Objektes. Die Zeitdifferenz des gesendeten und empfangenen Signals wird vom Radar-Steuergerät als Entfernung interpretiert.
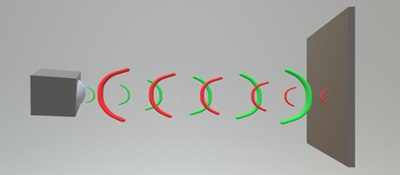
Bei dem oben beschriebenen Vorgehen handelt es sich allerdings um eine direkte Laufzeitmessung. Diese Art der Zeitmessung ist sehr aufwendig und für den Automobilbereich eher ungeeignet.
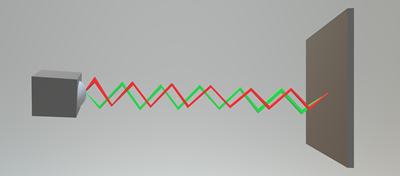
Im Automobilbereich kommt daher die indirekte Laufzeitmessung zu trage und zwar in Form eines FMCW-Radars (Frequency Modulated Continuous Wave), zu Deutsch „Frequenzmoduliertes Dauerstrich-Radar‟.
Dieses findet man in heutigen Distanzregelanlagen, z. B. Adaptive Cruise Control, wieder. Der Hauptunterschied zur direkten Laufzeitmessung liegt darin, dass kontinuierlich ein frequenzmoduliertes Signal ausgesendet wird, anstatt ein Signal einzeln auszusenden und auf sein Echo zu warten.
Der Frequenzbereich liegt dabei deutlich über anderen Nutzfrequenzen, damit er den öffentlichen Funk oder Flugzeugverkehr nicht stört. Beim ersten Audi A8, der mit dem System ausgestattet wurde, lag dieser bei 76,5 Gigahertz mit einer 200-Megahertz-Bandbreite für die Modulation. Der besondere Vorteil dieses Radars ist die Option, die relative Geschwindigkeit des vorausfahrenden Fahrzeuges zu bestimmen und nicht nur die Entfernung zu messen. Das ist wichtig, denn das System soll erkennen, ob das vorausfahrende Fahrzeug langsamer wird oder auch wieder beschleunigt.
Der Vorteil kommt durch die Auswertung des Dopplereffektes zu tragen.
 Quelle:Wikipedia
Quelle:Wikipedia
Den Dopplereffekt kennen Sie bestimmt aus dem Alltag. Wenn sich ein Fahrzeug mit einer Sirene nähert, steigt der Ton in seiner Frequenz leicht an. Sobald es vorbeigefahren ist, wird der Ton leiser und die Frequenz sinkt. Der Grundton ist immer gleichbleibend. Dieses Phänomen basiert auf dem Dopplereffekt. Das Radar kann dies im elektromagnetischen Bereich messen.
Der Radarstrahl breitet sich kegelförmig nach vorn aus. Um auf Autobahnen mehrere Spuren erkennen zu können, verwenden viele Hersteller einen Drei-Strahl-Radar. Dadurch ergeben sich drei Radarkegel, die das horizontale Sichtfeld erweitern.
Die Radarsteuergeräte sind heutzutage oftmals ein FlexRay-Teilnehmer (Note/Knotenpunkt) im Datenbus-System der Fahrzeuge. Sensor und Steuergerät bilden hierfür zusammen den Radarkopf.
In Kurvenfahrten benötigt das Steuergerät noch zusätzliche Daten von anderen Datenbus–Teilnehmern. Damit der Abstand auch in Kurven richtig gehalten werden kann, sind zusätzliche Sensoren, wie z. B. der Drehratensensor, Lenkwinkelsensor, Raddrehzahlsensoren, Kamerasteuergerät, u.v.m. notwendig. Auch Informationen des Navigation-Systems sind mittlerweile von immenser Bedeutung, da auch topografische Daten miteinbezogen werden.
Das Radar muss, genauso wie die Kamera, kalibriert werden. Kalibriert wird das Radar nach Herstellervorgaben und nicht zwingend nach jedem Scheibentausch. Das Radar wird definitiv kalibriert, wenn eine Achsvermessung mit Änderungen an der Vorder- oder Hinterachse vorgenommen wurde. Es wird auf Basis der geometrischen Fahrachse kalibriert, wie auch die Kamera.
Im statischen Kalibrierverfahren unterscheidet man zwischen „passivem‟ und „aktivem‟ Radar.
Der Radarkopf eines „passiven‟ Radars muss nach Herstellervorgabe mithilfe eines Justierlasers ausgerichtet werden.
Ein „aktives‟ Radar führt nach Aufforderung eine Testmessung durch und übergibt die Drehrichtung, in der die Stellschrauben am Radarkopf justiert werden müssen. Die Testmessung ermittelt den Dejustagewinkel. Dabei wird der Radarstrahl gegen eine massive Stahlplatte geworfen, die nach den Vorgaben des Herstellers platziert wurde.
Damit werden die horizontale und vertikale Achse in beiden Radarsystemen (aktiv und passiv) eingestellt.
Zudem gibt es Radarsysteme, die dynamisch, also während der Fahrt, kalibriert werden.
Bilder
Direct Radio Waves: Charly Whisky - Eigenes Werk, CC BY-SA 3.0, https://commons.wikimedia.orgwindex.phpcurid=19663736.png
Indirect FMCW: Georg Wiora (Dr. Schorsch) - Self drawn with Inkscape, CC BY-SA 3.0, https://commons.wikimedia.org/w/index.php?curid=353385
Doppler Effect: Charly Whisky 18:20, 27 January 2007 - Eigenes Werk, CC BY-SA 3.0, https://commons.wikimedia.org/w/index.php?curid=160682